2021.05.10
能動的刺激方式の脳性麻痺患者リハビリ支援機器・システムの開発
#産学連携 #東京大学 #リハビリ支援機器 #回路設計 #アクチュエータ
トップ > 技術ナレッジのアーカイブ > 能動的刺激方式の脳性麻痺患者リハビリ支援機器・システムの開発
2021.05.10
#産学連携 #東京大学 #リハビリ支援機器 #回路設計 #アクチュエータ

脳性麻痺や四肢の先天性異常など出産や成長過程で歩行障がいを持つ子供がいます。彼らには歩行補助用の装具が必要ですが、本文でも語られているように対象となる人口は少なく、企業だけで研究開発・製品化するのには限界があります。
そこで、この重要な課題に対して東京大学淺間研究室と株式会社テクノプロ テクノプロ・デザイン社が連携。テクノプロ・デザイン社から東京大学にエンジニアを派遣し研究開発を進めてきました。
今回はその取り組みの課題や研究成果について迫ってみました。
現在我が国を含む先進国では、少子高齢化が急速に進んでいます。特に近年では周産期医療の発展や高齢出産の増加によって低体重児の出生が増加しています。
このような低体重児は運動障害を発症するリスクが高く、このような幼小児の発達を支え、運動機能を改善する仕組みが必要です。
幼小児の発達および運動機能を改善することは生産年齢人口の減少に悩む社会において極めてインパクトが大きく、持続可能な社会を実現するためには非常に重要です。
このような課題に対して我々の研究室では、大阪にあります発達総合療育センターの医師や理学療法士の方々と議論を重ねてきました。
議論を通じて、乳幼児の運動機能の獲得は成人が行うリハビリテーションとは大きく異なっているということが分かってきました。
成人が脳卒中や脳梗塞などの脳損傷後にはリハビリテーション(Rehabilitation)を行い、運動の再学習・再獲得を目指すのに対して、脳性麻痺を抱えた子どもの場合は、運動機能を一から新たに獲得するためのハビリテーション(Habilitation)が必要となります。

また運動を支援するための装具に関しても、大人用のものは一度作ったあとは長く使えるのに対して、幼小児は成長につれて体格が大きくなるため、頻繁に装具を作り直す必要があります。
さらに子どもの中には肢体の変形が見られる場合があり、オーダーメイドで対応する必要があります。また社会復帰をするために意欲を持ってリハビリテーションに取り組む大人に対して、乳幼児の場合は周りの人たちのサポートが必要不可欠になります。
我々の研究室では高齢者や脳損傷後に運動機能が阻害された患者の方を対象に運動機能を診断したり、改善するための手法の開発を行ってきました。
しかし、今の脳性麻痺を抱える幼小児の方を取り巻く状況を考えると、対象となる人口は少ないものの、大学での研究として取り組んでいくべき重要な課題であると考え、2018年より新たに幼小児の運動機能を改善するための支援機器を開発する研究を行ってきました。

我々の研究室では今まで人の日常生活においてあらゆる動作の起点となる「立つ」という動作に着目してきました。自ら立って動くということは人としての尊厳に関わる重要な動作です。
また通常人は特に意識することなく立ちあがり、バランスを取ることができますが、脳機能に損傷があると立ってバランスを取ったり、歩くことが困難になります。本研究においても、この立つという動作を支援するために、足部の運動機能の獲得を支援するための機器の開発を行います。
我々が取り組む脳性麻痺児のための支援機器では、
が必要であると考えました。
脳性麻痺を抱える子どもが運動機能を新たに獲得するプロセスを支援するために、我々は理学療法士の方々が実際の脳性麻痺を抱えるお子さんに対して行っている手技に注目し、この手技のエッセンスを再現することを目指しました。
我々の研究室では今まで脳内身体表現と呼ばれる脳内における「身体を動かすための地図」に着目して研究を行ってきました(参考:移動知や身体性システム)。そこでは特に身体の末梢から与えられる感覚情報が身体を動かす上で重要であることが分かってきております。
本研究においても、理学療法士の方々が実際の脳性麻痺児の末梢である足部に刺激を与える動作を定量的に明らかにし、これを再現できるような支援機器の開発を目指しています。

また子どもの体格の変化に簡便に対応するために、我々は3Dプリンティング技術に着目しています。従来までの装具では足形を石膏で取り、それに合わせて装具を製作し、個々人の足のサイズに対応していました。これに対して、我々は3Dプリンティングによって支援機器を製造することで、より柔軟にかつスピーディーに設計から製作までが行えるようにしています。また機器をモジュール構造にすることで、異なる体格や行いたい運動機能プログラムに合わせて柔軟に構造を変えられるようにしています。
最後にこの支援機器は臨床現場だけではなく、ご家庭などでも使用できることを目指しています。そのためには機器は大掛かりなものになるのではなく、例えばスイッチひとつで操作できるようなものが望ましいです。また機械の扱いに慣れていない人や好奇心旺盛な子どもが支援機器を触る可能性があることから、安全性には十分に配慮する必要があります。
実現に向けて以下の観点から取り組みました。
本研究によって開発する支援機器では
が求められます。
目標1では実際の理学療法士の方との議論やインタビューを通じて、臨床現場における運動機能の獲得プログラムの中で足部に対してどのような介入を行っているかを調べています。
脳性麻痺児の足部への介入時には、理学療法士は単に足裏を指で押すだけではなく、特定の筋を伸ばしたり、足裏の複数箇所(筋とアーチなど)を同時に刺激するような複雑な技能を行っています。
また理学療法士は子どもの運動機能や足の状態を観察しながら介入を行っています。我々は開発する支援機器に求められる仕様を具体的に決定するために、我々は子どもの足にセンサを取り付けることで、理学療法士が介入中に「足のどの位置をどれくらいの強さでどれくらいの時間刺激しているのか」を調べることで、開発する支援機器において求められる仕様を定めてきました。

このような理学療法士の介入を再現するための支援機器を設計し、製作する際には使用者となる子どもの足裏の状態をセンシングし、理学療法士の介入技能を再現できる機構を設計する必要があります。またその際には目標2や目標3でも求められるように、このような介入技能を足の大きさや形状に関わらず再現できること、在宅においても安全に使用できることが求められます。
我々は理学療法士の介入技能を再現するために足裏の筋やアーチ部分を刺激する構造を考えてきました。ここでは3DCADを用いた構造の設計や動きのシミュレーションから3Dプリンタを利用したプロトタイプの制作を行っています(図1)

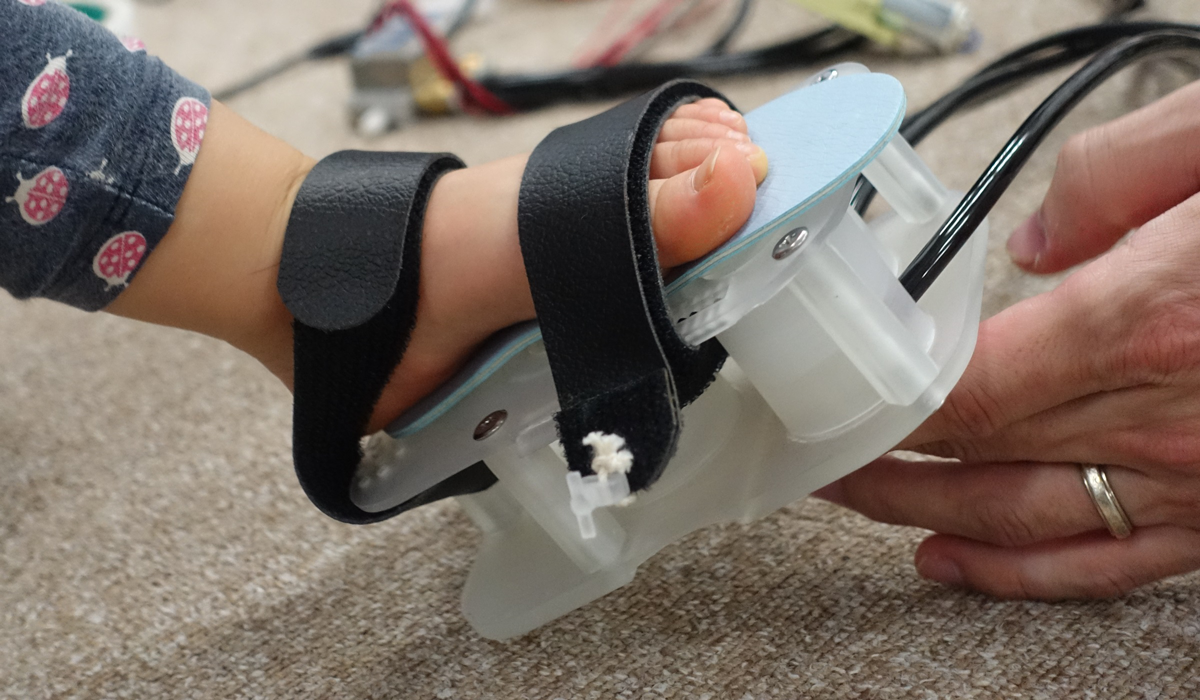
実際に制作されたものは研究者自身で試すことで試行錯誤的に開発を行ってきました。さらに、子どもの足の大きさの違いにも対応できるようにセンシング機能とアクチュエータが一体になったモジュールを設計しました。
このようなモジュールを使うことで、子どもの足が大きくなってもモジュールの位置を微調整することで変わらぬ支援を行うことができるようにしました。特にご家庭でも安全に使えるように本支援機器では、空気圧のアクチュエータを用いることにしました。また足裏を刺激する装置の刺激量(変位)も制限をすることで、本質的に安全なシステムを構築しています(図2)。
ご家庭でも使えるようにシステム全体も大きくならないように、センサの選定や機器の設計、電気回路の設計を行い、マイコンによる制御からスタンドアロンな動作をすることができます。
このように支援機器の設計では様々な要素が絡み合います。
また子どもの身体に密着し、機械システムに詳しくない人が使用することを想定しております。
このような支援機器を開発するためには、実際の臨床現場で行われている現象を注意深く観察し、そのエッセンスを抽出して必要十分な機能を機器にて実装する必要があり、メカトロニクス全般に渡る知識と技術の結集が必要不可欠です。
脳性麻痺児のための支援機器というのは、その患者数の絶対的な少なさや要素技術の難しさから産業界における研究開発が進んでいない分野でした。
また大学における研究は個々の要素技術の開発やデータの分析は得意です。それに対して新たに産業界における経験が豊富な技術者を研究室に迎えることで、基礎研究から応用研究という出口を見据えながら研究開発を行うことができます。そのため、基礎研究の面白さを汲み取りつつ、求められる要素を統合し、共に現実世界において利用されるシステムに昇華していくことに取り組んでいきたいと思っています。
我々の研究室ではヒトの運動制御理論に関して、神経生理学やバイオメカニクス、数理モデルの構築を行っており、これらの研究から人が自分自身の身体を動かすメカニズムを調査し、脳損傷後に運動機能を改善するためのリハビリテーションに関する研究を行ってきました。本共同研究で対象としている脳性麻痺児のための支援装置では、我々が培ってきた基礎的な知見を応用し、さらに使用する子どもの症状や体格に合わせてテーラーメイドで製作する必要があります。
このように本研究は神経生理学やリハビリテーション医学などの知見をベースに研究開発を進めており、量産メーカの開発の現場において使用されてきた用語や考え方、使う実験装置なども大きく異なっていました。

それに対して我々は医師や理学療法士、義肢装具士なども交えた議論や実際の臨床現場の見学を重ねて、お互いの知見や技術の融合を図ってきました。
このような研究開発の課題に関して量産メーカなどでは、安全性を第一に自分たちの経験がある技術をベースに開発を進めますが、大学では新規の技術導入に対しても積極的に行い、原理試作機を製作し実際に効果があるかどうかを検証することに長けております。
このように得意とする研究開発のフェーズは大きく異なり、特に量産メーカにおける現場経験(製品の質・安全性の担保)と大学におけるシーズの創出が組み合わさることでよりスピーディな研究開発が進められると考えられます。
1959年北海道生まれ東京育ち。
1984 年東京大学大学院修士課程修了。1986年より理化学研究所。2002 年東京大学人工物工学研究センター教授。2009 年同大学院工学系研究科教授。2019年同研究科人工物工学研究センター長。サービスロボティクスの研究・社会実装等に従事。日本学術会議会員、IFAC会長、IEEEフェロー、日本機械学会フェロー、日本ロボット学会フェロー、工学博士(東京大学)
1986年中国吉林省生まれ東京育ち。
2014年東京大学大学院 工学研究科 精密工学専攻 博士後期課程修了、博士(工学)。2015年より東京大学にて助教として勤務し、ヒトの運動制御メカニズムを解明し、得られた知見のリハビリテーションへの応用や運動支援装置の開発に従事している。2020年より九州大学大学院システム情報科学研究院にて准教授。2児の父で週末は家族で遊ぶことと司馬遼太郎などの歴史小説を読むことが好き。
2008年より市川市リハビリテーション病院に勤務し、理学療法士として脳卒中患者のリハビリテーションに従事。2012年千葉大学大学院修士課程修了、2016年同大学院博士課程修了(医学博士)。イタリア認知神経リハビリテーションセンターでの研修を経て、2018年より文京学院大学助手として勤務し、2020年より東京大学工学系研究科の特任助教として勤務。運動学習のメカニズムやリハビリテーションの介入効果に関する研究に従事。
2009年にローマ・ラ・サピエンツァ大学にて学位を取得し、2012年に同大学にて修士課程を修了。修士課程在学中にTexas A&M大学CRASARに1年間在籍。2016年にKing’s College Londonにてロボット工学の博士号を取得。2016年より東京大学工学系研究科の研究員、2019年より特任助教として勤務。3Dプリンティング・スマートデバイスの作成や新しい材料トポロジーの開発、適応型センシングメカニズムに関する研究に従事。Robotics and Automation Magazine (RAM)の編集委員、IEEE Technical Committee for Performance Evaluation & Benchmarking of Robotic and Automation Systems (TC-PEBRAS)の共同議長を務める。
1986年福井県生まれ。
2018年テクノプロデザイン中途入社。
それまで医療・調剤機器メーカの電子設計担当として勤務。
入社後、運送ロボの自動充電装置開発等を経験。
今まで電子ハード設計分野を中心に業務を行い、自分のレベルはどのくらい通用するのかという指標をつかむため共同研究に挑戦。
現在共同研究を通じプログラミング言語を習得中で、後々ハード・ソフト設計業務の両立が出来ることを目標としている。
1988年秋田県生まれ。
2012年テクノプロデザイン入社。入社後、組み込みSW開発、車載ECUのSW設計等を経験。
元々研究職に興味があり、通常の転属では研究職への転勤は滅多にない中で産学連携を知り、
こういったチャンスはもうない。稀少な経験ができるチャンスを逃す手はないと思い参加。
0から設計する今の環境において、仕様書や詳細設計の様式、書き方等、派遣先だと面倒に感じていたことが
実は多くのノウハウが含まれていたこと肌身で感じている。
1979年茨城県生まれ。
プラスチック射出成形における成形現場、金型加工・組付け、金型設計などの技術を学び、
機構設計や品質管理、コンサルタントの経験を経て、2018年テクノプロデザイン社に入社。
2019年より機械分野のエンジニアとして共同研究プロジェクトへ参画。
世の中のなんでもプラスチックを悪者にする動きを見下している。
研究室の3Dプリンタに利便性と重要性を感じ、自宅にも導入。日々様々なものを出力しながら、新しいプロダクトを生み出すことを画策する。
LineではQRコードから登録していただくか「友だち追加」ボタンから登録できます。メールで登録ご希望の方はこちらから
※登録頂いた個人情報は次の目的で利用します。 ①テクノヒントからの情報発信②テクノヒント運用に関するアンケート依頼の案内など
